Think of a gang, patrolling at the front gate of a castle, protecting an area on a bridge.
Looking inside each members of the gang game, we may see
SteeringForce +=
wander() * wanderAmount * wanderProirity +
obstacleAvoidance() * avoidAmount * avoidPriority +
aligness() * alignAmount * alignPriority +
cohesion() * cohesionAmount * cohesionPriority +
seperation() * seperationAmount * seperationPriority +
alignment() * alignAmount * alignPriority +
wallAvoidance() * wallAvoidanceAmount * wallAvoidPriority +
chasePrey() * chaseAmount * chasePriority +
avoidPrey() * avoidAmount * avoidPriority
What is going on here? A round robin between two models:
steer | | v Player ---> thrust
How to control a whole host of behaviors:.
When in doubt, pattern movement. At any "X", going in direction "Y", pick any neighbor at random, favoring those nearer your current compass bearing:
pattern[0]={1111111111
1111111111
1111111111
1111111111
1111111111
1111111111
1111111111}
pattern[1]={1...1..111
.1.1..1...1
1.1.......1
.1..111.1.1
1..1...1.1.
1.1........
11.........}
pattern[2]=
Pick patterns at random. Note: pattern[0] means random walk.
Actor X drops bread crumbs. Actor Y steers towards zones of higher bread crumb results.
Bread crumbing have some nice computational properties; e.g. very fast to compute.
Kind of pattern movements, for groups.
Look around to a distance of "D" for an plus/minus "X" degrees from your current compass bearing:
With that knowledge, work out how much to operate, align, cohere:
 | Separation: steer to avoid crowding local flock mates (give this one the highest priority) |
 | Alignment: steer towards the average heading of local flock mates |
 | Cohesion: steer to move toward the average position of local flock mates,
maybe weighted by your compass bearing
741 973 741 |
(See also Lennard-Jones functions for combining the above into one equation.)
Do a weighted sum of the neighborhood, giving a "leader" more weight than the rest of the flock.
Now the problem of programming the flock reduces to just the problem of programming the leader.
Note: the leader can be selected dynamically:
Predict where the food will be, steer towards there.
Predict where the prey will be, steer away from there.
Or, with knowledge of the terrain, find a predator's blind spot (behind a rock) and go steer to there.
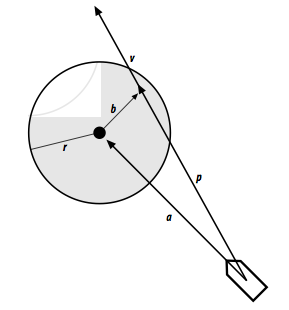
Extend "feelers".
If they fall within "r" of some obstacle, then insert a steering force "b" to deflect the actor
Given a terrain map of regions (rooms, valleys with passes between them, oceans connected by straights),
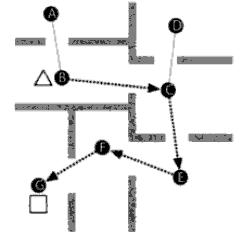
To compute way points:
M1= A B C D E F G
A . 1 . . . . .
B . . 1 . . . .
C . . . 1 1 . .
D . . . . . . .
E . . . . . 1 .
F . . . . . . 1
G . . . . . . .
M2= A B C D E F G
A . 1 . . . . .
B 1 . 1 . . . .
C . 1 . 1 1 . .
D . . 1 . . . .
E . . 1 . . 1 .
F . . . . 1 . 1
G . . . . . 1 .
If you want some geography, add distance measure instead of just "1"
D1= A B C D E F G
A . 4 . . . . .
B . . 2 . . . .
C . . . 9 7 . .
D . . . . . . .
E . . . . . 8 .
F . . . . . . 3
G . . . . . . .
These numbers can reflect difficulty in traversing some region (e.g. mud, quicksand, steep slopes)
Navigation in two steps: go straight to the nearest way point, then path follow from weigh point to weigh point.
1 function Dijkstra(Graph, source):
2 for each vertex v in Graph: // Initializations
3 dist[v] := infinity // Unknown distance function from source to v
4 previous[v] := undefined
5 dist[source] := 0 // Distance from source to source
6 Q := copy(Graph) // All nodes in the graph are unoptimized - thus are in Q
7 while Q is not empty: // The main loop
8 u := extract_min(Q) // Remove and return best vertex from nodes in two given nodes
// we would use a path finding algorithm on the new graph, such as depth-first search.
9 for each neighbor v of u: // where v has not yet been removed from Q.
10 alt = dist[u] + length(u, v)
11 if alt < dist[v] // Relax (u,v)
12 dist[v] := alt
13 previous[v] := u
14 return previous[]
When wondering a path, remember to stagger a little and steer more at corners.
And for crowds to walk paths, add obstacle avoidance.
Recall our geography maps:
D1= A B C D E F G
A . 4 . . . . .
B . . 2 . . . .
C . . . 9 7 . .
D . . . . . . .
E . . . . . 8 .
F . . . . . . 3
G . . . . . . .
Remember that these numbers can reflect difficulty in traversing some region (e.g. mud, quicksand, steep slopes)
An influence map is a second "geography" map that changes at runtime. E.g. suppose you keep dying every time you walk from G to A:
Inf= A B C D E F G
A . . . . . . .
B . . . . . . .
C . . . . . . .
D . . . . . . .
E . . . . . . .
F . . . . . . .
G 10 . . . . . .
So now we can do A* to minimize g(x)+h(x) where "h=D+Inf"
So if the above methods are all standard, the enemy knows them too.
Q1: How can you reason about the enemy reasoning about your reasoning?
Q2: How you do the above faster?
See http://www.ocf.berkeley.edu/~yosenl/extras/alphabeta/alphabeta.html
There is a common illusion that we first generate a n-ply minmax tree and then apply alpha-beta prune. No, we generate the tree and apply alpha-beta prune at the same time (otherwise, no point).
How effective is alpha-beta pruning? It depends on the order in which children are visited. If children of a node are visited in the worst possible order, it may be that no pruning occurs. For max nodes, we want to visit the best child first so that time is not wasted in the rest of the children exploring worse scenarios. For min nodes, we want to visit the worst child first (from our perspective, not the opponent's.) There are two obvious sources of this information:
When the optimal child is selected at every opportunity, alpha-beta pruning causes all the rest of the children to be pruned away at every other level of the tree; only that one child is explored. This means that on average the tree can searched twice as deeply as before?a huge increase in searching performance.