Search is a universal problem solving mechanism in AI. The sequence of steps required to solve a problem is not known a priori and it must be determined by a search exploration of alternatives.
In computer science, a state space is a description of a configuration of discrete states used as a simple model of machines. Formally, it can be defined as a tuple [N, A, S, G] where:
Often, there are oracles that offer clues on the current progress in the search
While "g(x)" can be known exactly (since it is a log of the past) while "h(x)" is a heuristic guess-timate (since we have not searched there yet).
The state space is what state space search searches in. Graph theory is helpful in understanding and reasoning about state spaces.
A state space has some common properties:
In this lecture, we will explore two kinds of search engines:
Ordered search is useful for problems with some inherent ordering (e.g.) walking a maze.
Unordered search is useful for problems where ordering does not matter. For example, if a simulator accepts N inputs, then an unordered search might supply M ≤ N inputs and the rest are filled in at random.
In practice, S may not be pre-computed and cached. Rather, the successors to some state "s" may be computed using some "successors" function only when, or if, we ever reach "s". In the following code:
(defun tree-search (states goal-p successors combiner)
(labels ((next () (funcall successors (first states)))
(more-states () (funcall combiner (next) (rest states))
(cond ((null states) nil) ; failure. boo!
((funcall goal-p (first states)) (first states)) ; success!
(t (tree-search ; more to do
(more-states) goal-p successors combiner))))
Example: Monkey pushing a chair under a banana, climbs the chair, eats the banana
(defparameter *banana-ops*
(list
(op 'climb-on-chair
:preconds '(chair-at-middle-room at-middle-room on-floor)
:add-list '(at-bananas on-chair)
:del-list '(at-middle-room on-floor))
(op 'push-chair-from-door-to-middle-room
:preconds '(chair-at-door at-door)
:add-list '(chair-at-middle-room at-middle-room)
:del-list '(chair-at-door at-door))
(op 'walk-from-door-to-middle-room
:preconds '(at-door on-floor)
:add-list '(at-middle-room)
:del-list '(at-door))
(op 'grasp-bananas
:preconds '(at-bananas empty-handed)
:add-list '(has-bananas)
:del-list '(empty-handed))
(op 'drop-ball
:preconds '(has-ball)
:add-list '(empty-handed)
:del-list '(has-ball))
(op 'eat-bananas
:preconds '(has-bananas)
:add-list '(empty-handed not-hungry)
:del-list '(has-bananas hungry))))
If the search space is small, then it is possible to write it manually (see above).
More commonly, the search space is auto-generated from some other representations (like the two examples that follow).
Here's walking a maze where "op" is inferred from the maze description:
(defparameter *maze-ops*
(mappend #'make-maze-ops
'((1 2) (2 3) (3 4) (4 9) (9 14) (9 8) (8 7) (7 12) (12 13)
(12 11) (11 6) (11 16) (16 17) (17 22) (21 22) (22 23)
(23 18) (23 24) (24 19) (19 20) (20 15) (15 10) (10 5) (20 25))))
(defun make-maze-op (here there)
"Make an operator to move between two places"
(op `(move from ,here to ,there)
:preconds `((at ,here))
:add-list `((at ,there))
:del-list `((at ,here))))
(defun make-maze-ops (pair)
"Make maze ops in both directions"
(list (make-maze-op (first pair) (second pair))
(make-maze-op (second pair) (first pair))))
Here's stacking some boxes till they get into some desired order.
(defun move-op (a b c)
"Make an operator to move A from B to C."
(op `(move ,a from ,b to ,c)
:preconds `((space on ,a) (space on ,c) (,a on ,b))
:add-list (move-ons a b c)
:del-list (move-ons a c b)))
(defun move-ons (a b c)
(if (eq b 'table)
`((,a on ,c))
`((,a on ,c) (space on ,b))))
(defun make-block-ops (blocks)
(let ((ops nil))
(dolist (a blocks)
(dolist (b blocks)
(unless (equal a b)
(dolist (c blocks)
(unless (or (equal c a) (equal c b))
(push (move-op a b c) ops)))
(push (move-op a 'table b) ops)
(push (move-op a b 'table) ops))))
ops))
General search methods to:
M(b,d) <= b^d*(1 - 1/b)^(-2)As the branching factor increases, the extra overhead of DFID's repeated search over breadth-first "b^d" search approaches unity:
For source code on the above, see here.
This stochastic tree search can be readily adapted to other problem types.
Eg#1: scheduling problems
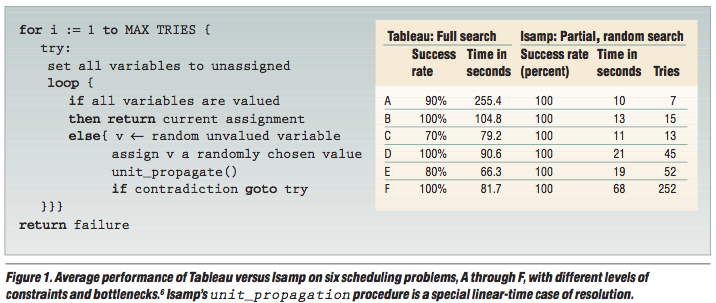
Eg#2: N-queens with the lurch algorithm. From state "x", pick an out-arc at random. Follow it to some max depth. Restart.
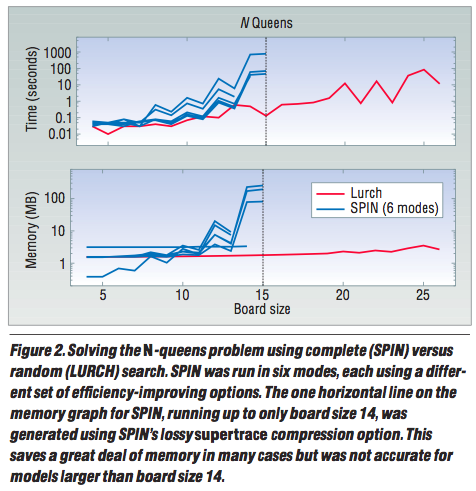
Q: Why does Isamp work so well. work so well?
Like tree search, but with a *visited* list that checks if some state has not been reached before.
Visited list can take a lot of memory
A* search: standard game playing technique:
Strangely, order may not matter. Rather than struggle with lots of tricky decisions,
S. Kirkpatrick and C. D. Gelatt and M. P. Vecchi Optimization by Simulated Annealing, Science, Number 4598, 13 May 1983, volume 220, 4598, pages 671680,1983.
s := s0; e := E(s) // Initial state, energy. sb := s; eb := e // Initial "best" solution k := 0 // Energy evaluation count. WHILE k < kmax and e > emax // While time remains & not good enough: sn := neighbor(s) // Pick some neighbor. en := E(sn) // Compute its energy. IF en < eb // Is this a new best? THEN sb := sn; eb := en // Yes, save it. FI IF random() > P(e, en, k/kmax) // Should we move to it? THEN s := sn; e := en // Yes, change state. FI k := k + 1 // One more evaluation done RETURN sb // Return the best solution found.
Note the space requirements for SA: only enough RAM to hold 3 solutions. Very good for old fashioned machines.
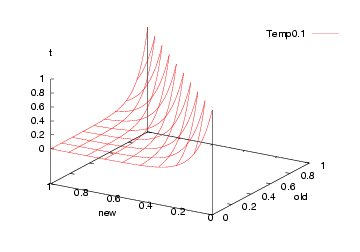
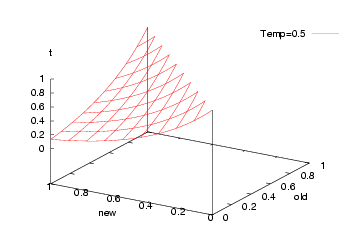
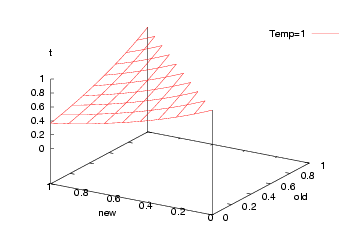
But what to us for the probability function "P"? This is standard function:
FUNCTION P(old,new,t) = e^((old-new)/t)Which, incidentally, looks like this:
That is, we jump to a worse solution when "random() > P" in two cases:
Note that such crazy jumps let us escape local minima.
Kautz, H., Selman, B., & Jiang, Y. A general stochastic approach to solving problems with hard and soft constraints. In D. Gu, J. Du and P. Pardalos (Eds.), The satisfiability problem: Theory and applications, 573586. New York, NY, 1997.
State of the art search algorithm.
FOR i = 1 to max-tries DO
solution = random assignment
FOR j =1 to max-changes DO
IF score(solution) > threshold
THEN RETURN solution
FI
c = random part of solution
IF p < random()
THEN change a random setting in c
ELSE change setting in c that maximizes score(solution)
FI
RETURN failure, best solution found
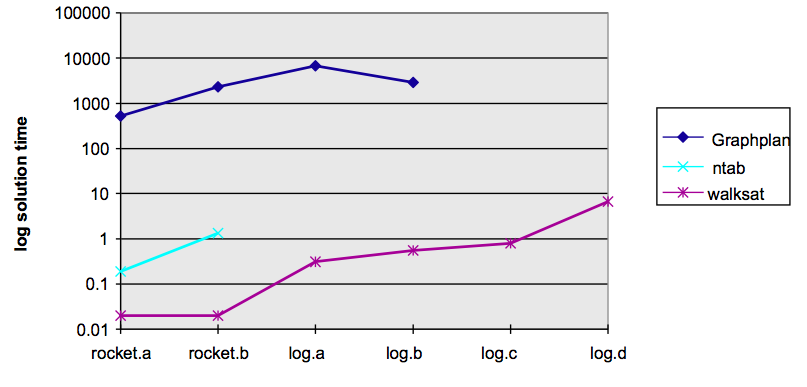
This is a very successful algorithm. Here's some performance of WALKSAT (a simpler version of MAXWALKSAT) against a complete search
 You saw another example in the introduction to this subject.
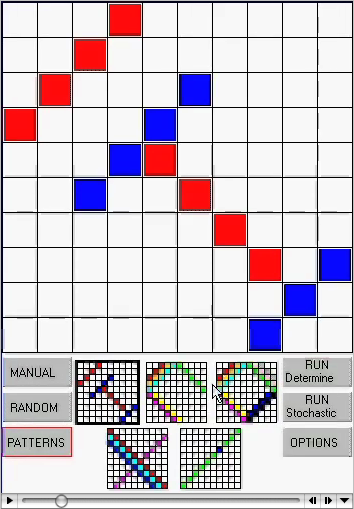
The movie at right shows two AI algorithms t$
solve the "latin's square" problem: i.e. pick an initial pattern, then try to
fill in the rest of the square with no two colors on the same row or column.
You saw another example in the introduction to this subject.
The movie at right shows two AI algorithms t$
solve the "latin's square" problem: i.e. pick an initial pattern, then try to
fill in the rest of the square with no two colors on the same row or column.
This stochastic local search kills the latin squares problem (and, incidently, many other problems).