| [ << ] | [ < ] | [ Up ] | [ > ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
Think of a gang, patrolling at the front gate of a castle, protecting an area on a bridge.
Looking inside each members of the gang game, we may see
SteeringForce +=
wander() * wanderAmount * wanderProirity +
obstacleAvoidance() * avoidAmount * avoidPriority +
aligness() * alignAmount * alignPriority +
cohesion() * cohesionAmount * cohesionPriority +
seperation() * seperationAmount * seperationPriority +
alignment() * alignAmount * alignPriority +
wallAvoidance() * wallAvoidanceAmount * wallAvoidPriority +
chasePrey() * chaseAmount * chasePriority +
avoidPrey() * avoidAmount * avoidPriority
What is going on here? A round robin between two models:
steer | | v Player ---> thrust
How to control a whole host of behaviors:.
When in doubt, pattern movement. At any "X", going in direction "Y", pick any neighbor at random, favoring those nearer your current compass bearing:
pattern[0]={1111111111
1111111111
1111111111
1111111111
1111111111
1111111111
1111111111}
pattern[1]={1...1..111
.1.1..1...1
1.1.......1
.1..111.1.1
1..1...1.1.
1.1........
11.........}
pattern[2]=
Pick patterns at random. Note: pattern[0] means random walk.
Actor X drops bread crumbs. Actor Y steers towards (or away) zones of higher bread crumb results.
Bread crumbing have some nice computational properties; e.g. very fast to compute.
Kind of pattern movements, for groups.
Look around to a distance of "D" for an plus/minus "X" degrees from your current compass bearing:

With that knowledge, work out how much to operate, align, cohere...
Separation: steer to avoid crowding local flock mates (give this one the highest priority)
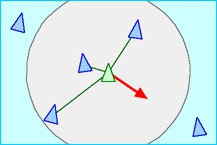
Alignment: steer towards the average heading of local flock mates
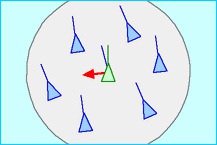
Cohesion: Cohesion: steer to move toward the average position of local flock mates,
( maybe weighted by your compass bearing; e.g....
741 973 741
)
(See also Lennard-Jones functions for combining the above into one equation.)
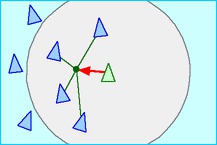
Do a weighted sum of the neighborhood, giving a "leader" more weight than the rest of the flock.
Now the problem of programming the flock reduces to just the problem of programming the leader.
Note: the leader can be selected dynamically:
Predict where the food will be, steer towards there.
Predict where the prey will be, steer away from there.
Or, with knowledge of the terrain, find a predator’s blind spot (behind a rock) and go steer to there.
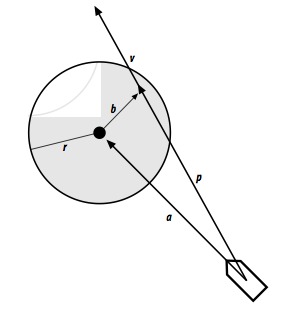
Extend "feelers".
If they fall within "r" of some obstacle, then insert a steering force "b" to deflect the actor
Given a terrain map of regions (rooms, valleys with passes between them, oceans connected by straights),
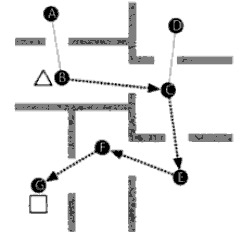
To compute way points:
M1= A B C D E F G
A . 1 . . . . .
B . . 1 . . . .
C . . . 1 1 . .
D . . . . . . .
E . . . . . 1 .
F . . . . . . 1
G . . . . . . .
M2= A B C D E F G
A . 1 . . . . .
B 1 . 1 . . . .
C . 1 . 1 1 . .
D . . 1 . . . .
E . . 1 . . 1 .
F . . . . 1 . 1
G . . . . . 1 .
If you want some geography, add distance measure instead of just "1"
D1= A B C D E F G
A . 4 . . . . .
B . . 2 . . . .
C . . . 9 7 . .
D . . . . . . .
E . . . . . 8 .
F . . . . . . 3
G . . . . . . .
These numbers can reflect difficulty in traversing some region (e.g. mud, quicksand, steep slopes)
Navigation in two steps: go straight to the nearest way point, then path follow from weigh point to weigh point.
1 function Dijkstra(Graph, source):
2 for each vertex v in Graph: // Initializations
3 dist[v] := infinity // Unknown distance function from source to v
4 previous[v] := undefined
5 dist[source] := 0 // Distance from source to source
6 Q := copy(Graph) // All nodes in the graph are unoptimized - thus are in Q
7 while Q is not empty: // The main loop
8 u := extract_min(Q) // Remove and return best vertex from nodes in two given nodes
// we would use a path finding algorithm on the new graph, such as depth-first search.
9 for each neighbor v of u: // where v has not yet been removed from Q.
10 alt = dist[u] + length(u, v)
11 if alt < dist[v] // Relax (u,v)
12 dist[v] := alt
13 previous[v] := u
14 return previous[
Note: "previous[]" can be pre-computed and cached (fast runtimes).
When wondering a path, remember to stagger a little and steer more at corners.
And for crowds to walk paths, add obstacle avoidance.
Recall our geography maps:
D1= A B C D E F G
A . 4 . . . . .
B . . 2 . . . .
C . . . 9 7 . .
D . . . . . . .
E . . . . . 8 .
F . . . . . . 3
G . . . . . . .R
Remember that these numbers can reflect difficulty in traversing some region (e.g. mud, quicksand, steep slopes)
An influence map is a second "geography" map that changes at runtime. E.g. suppose you keep dying every time you walk from G to A:
Inf= A B C D E F G
A . . . . . . .
B . . . . . . .
C . . . . . . .
D . . . . . . .
E . . . . . . .
F . . . . . . .
G 10 . . . . . .
So now we can do A* to minimize g(x)+h(x) where "h=D+Inf"
Impact of potential fields (a.k.a. infleunce maps) on a game.
| [ << ] | [ < ] | [ Up ] | [ > ] | [ >> ] | [Top] | [Contents] | [Index] | [ ? ] |
This document was generated on March 1, 2011 using texi2html 5.0.